「フィジカルAI」とは?
次世代のAI技術が変える私たちの世界!
近年のChatGPTをはじめとする生成AIの急速な発展により、AIの可能性が大きく広がっています。しかし、現在の生成AIは主にデジタルな世界でテキストや画像を扱うことに特化しており、私たちが暮らす現実の物理的な世界との直接的なやり取りには限界があります。
そこで注目を集めているのが「フィジカルAI(物理AI)」です。
この記事では、フィジカルAIの概要や特徴、最新の開発状況、そして私たちの生活や社会にもたらす変革について考察します。
フィジカルAIとは?
フィジカルAI(物理AI)とは、物理法則を理解し、環境や物体と直接相互作用しながら動作するAI技術を指します。従来のAIがデジタル空間でのデータ処理や意思決定に特化していたのに対し、フィジカルAIはロボティクス、センシング技術、制御システムと統合され、物理環境での実行を目的としています。
簡単に言えば、「物理的な世界のルールを理解し、それに基づいて行動・判断できるAI」と言えるでしょう。重力、摩擦、衝突などの物理法則を理解し、実世界で自律的に行動できる能力を持つのが特徴です。
AIが「身体」を持つ時代へ
2026年、AIの主戦場はデジタルな画面の中から、私たちが暮らす現実世界(物理空間)へと劇的にシフトしようとしています。このパラダイムシフトを象徴する言葉がフィジカルAIです。
これまで、AIはテキスト生成や画像認識といった「情報の処理」を主な任務としてきました。
しかし今、AIはロボットという「身体」を獲得し、自律的に物理世界を理解し、活動する存在へと進化しています。
「従来のロボット」と「フィジカルAI」の決定的な対比
工場のラインで動くこれまでのロボットと、フィジカルAIを分かつのは「学習の質」です。
- 従来のロボット(人間によるプログラミング):人間が書いたコードに従って、あらかじめ決められた作業のみを遂行します。想定外の出来事には対応できず、いわば「実験室」の中だけで機能する存在でした。
- フィジカルAI(AIによる物理法則の学習):明示的なプログラミングではなく、AIが自ら世界のルールを学習します。未知の環境でも状況を判断して動けるため、「実験室から日常世界へ」と飛び出すことが可能になったのです。
この進化を支えるのが、AIに搭載される「2つの異なる脳」です。
AIロボットを自律させる「2つの脳」の役割
複雑な現実世界でロボットを自律させるには、人間と同様に「どう動くかを考える脳」と、「何が起こるかを予測する脳」の2つが不可欠です。
| 項目 | 行動する脳:VLAモデル | 予測する脳:世界モデル |
| 定義 | Vision(画像)、Language(言語)、Action(動作)を統合したモデル | 動画や観測データから物理法則や因果関係を学習したシミュレーター |
| 役割 | 視覚と言語指示から、具体的な動作コマンドを生成する | 「こう動いたら、こうなる」という未来の物理的な結果を予測する |
| 代表例 | Google「RT-2」、NVIDIA「alpamayo」 | OpenAI「Sora」、Google「Genie 2」 |
| 動作例 | 「ペットボトルを捨てて」という指示に対し、掴む手の角度や強さを計算する | 「グラスを落とせば割れる」「ハンドルを切れば車が曲がる」という結果を脳内で描く |
| 弱点 | 行動の物理的なリスク(失敗の予測)を事前に予見するのが苦手 | 未来の映像を想像できても、ロボットへの具体的な駆動命令は出力できない |
企業別・開発ロードマップと提携エコシステム
フィジカルAIは、AIモデルの開発力とロボット実機を持つ企業との提携が鍵となります。
Google (DeepMind)
最先端の推論能力をロボットに統合する戦略を推進しています。
- Gemini Robotics:マルチモーダルモデル「Gemini」を活用し、3D空間内での高度な推論とナビゲーションを実現。
- RT-2:言語と動作を直結させるVLAモデルの先駆け。「思考の連鎖(Chain-of-Thought)」を組み込むことで、行動の前に論理的な推論を行うプロセスを実装。
- Genie 2:1枚の画像から操作可能な3D仮想空間を生成する世界モデル。
- 提携:Boston Dynamicsのヒューマノイド「ATLAS」にこれらのモデルを搭載し、実戦投入を進めています。
OpenAI
動画生成で得た知見を、パートナーシップを通じて実機に落とし込んでいます。
- Sora:動画生成を通じて培った、物理世界のシミュレーション能力をロボット制御に転用。
- 提携と投資:かつてFigure AI(人型ロボット Figure 01 )と提携し、スムーズな会話と動作を披露しましたが、この直接的な提携はほどなく解消されました。現在はVLA開発をリードするPhysical Intelligenceや、ロボティクス企業1Xへの出資を通じて、技術の社会実装を狙っています。
NVIDIA
強力なハードウェアを武器に、学習環境ごと提供するエコシステム戦略です。
- Project GR00T:ロボット開発のための汎用基盤モデル。
- Omniverse:デジタルツイン(仮想空間)上で、世界モデルを活用した超高速な学習環境を提供。
- Cosmos & alpamayo:「学習可能な世界モデル基盤」であるCosmosと、独自VLAのalpamayoを発表。開発者が自律ロボットを構築するためのプラットフォームを盤石にしています。
Alibaba
VLAと世界モデルの統合をリードする研究を提案しています。
- WorldVLA:2つの脳を単一のフレームワークに統合した革新的なアーキテクチャ。
- 実証実験:中国のロボット企業Unitreeや、自動運転技術のHalloと提携し、モデルの有効性を検証しています。
2つの脳が融合する「WorldVLA」の衝撃
現在、注目されているのが、Alibabaなどが提唱する統合モデル「WorldVLA」です。
統合後のAIが実行する3つの思考プロセス
- 現状認識(VLAの役割):カメラ映像と言語指示から、現在の状況を多角的に理解する。
- 未来予測(世界モデルの役割):「ある行動をとった場合、次の瞬間に世界がどう変化するか」を脳内で高速シミュレーションする。
- 行動実行(VLAの役割):シミュレーションの結果、最も成功率が高いと予測された最適なアクションだけを実行に移す。
統合による劇的な進化
- タスク成功率の向上:把持(物を掴む)などの繊細な作業において、成功率が劇的に改善。
- シミュレーション精度の向上:Alibabaの研究では、モデルに行動情報(Action)を学習させることで、世界モデルが生成する未来予測動画の質そのものが向上するという「相乗効果」が確認されています。
- 学習コストの低下:現実世界で何度も失敗して学ぶのではなく、脳内で試行錯誤を行い、「成功パターンのみを現実に適用」できるため、学習速度が飛躍的に高まります。
フィジカルAIの特徴
フィジカルAIには、従来の生成AIとは異なる独自の特徴があります。
物理法則の理解と適応
フィジカルAIは、重力・衝突・振動・照度などの実世界の物理法則を理解しながら動作できます。
テキストや画像といった非物理的な情報を扱う生成AIとは異なり、現実の物理世界の制約や性質を認識し、それに適応する能力を持っています。
自律性の向上
環境の変化に応じた自律的な意思決定が可能です。AIがリアルタイムで周囲の状況を分析し、最適な行動を選択することで、人間の介入を最小限に抑えられます。
例えば、自律移動ロボットが障害物を検知しながら目的地へ到達したり、倉庫内のAIエージェントが他のロボットと連携しながら効率的なルートを選択したりできます。
安全性の確保
AIが危険な環境での作業を代行することで、人間のリスクを大幅に軽減できます。
AIエージェントは危険な状況を事前に検知し、事故を防ぐ役割も担います。
例えば、工場や災害現場の自律型ロボットが人間が近づけない場所で作業を遂行したり、AI搭載のドローンが地震や火災の現場で被災者を捜索したりといった活用が可能です。
精度の向上
センサーやカメラを活用し、リアルタイムでの状況認識と精密な動作制御が可能になります。
AIがこれらのデータを分析し、適切な行動を選択することで、より精度の高い判断が可能になります。
フィジカルAIを支える技術
フィジカルAIを実現するためには、複数の技術要素が必要です。
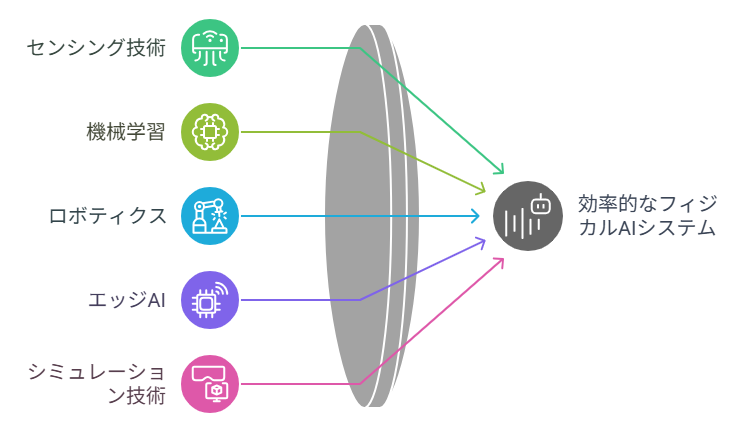
センシング技術(環境認識)
フィジカルAIは環境を正確に把握するため、複数のセンサーを組み合わせたマルチモーダルセンシングが重要になります。
- LiDAR(Light Detection and Ranging):レーザーで距離を測定し、3Dマップを作成
- RGBカメラ(可視光カメラ):画像を取得し、物体認識やシーン解析を行う
- 深度カメラ(Depth Camera):3D情報を取得し、物体の形状や位置を把握
- IMU(慣性計測装置):加速度・ジャイロセンサーを組み合わせ、動きや傾きを測定
- 超音波センサー:音波の反射を利用して距離を測定
- 温度・圧力センサー:環境の温度・圧力変化を検知
機械学習・強化学習(動作最適化)
物理環境に適応しながら動作するために、フィジカルAIは機械学習や強化学習を活用します。
- 教師あり学習:正解データを使って学習し、分類や回帰問題に適用
- 教師なし学習:ラベルなしデータを解析し、パターンを抽出
- 強化学習:試行錯誤を繰り返し、報酬を最大化する行動を学習
- 模倣学習:人間の動作を模倣して学習
ロボティクス(物理的な動作制御)
フィジカルAIは、環境を認識するだけでなく、実際に動作を実行するためのロボティクス技術が不可欠です。
- アクチュエータ:モーターや油圧システムを使い、ロボットの関節や腕を動かす
- エンドエフェクタ:ロボットの手や爪に相当する部分(例: 産業ロボットのグリッパー)
- モーションプランニング:経路計画や衝突回避を計算し、スムーズな動作を実現
エッジAI(リアルタイム処理)
クラウドに依存せず、デバイス上でAIを実行する「エッジAI」は、フィジカルAIにとって非常に重要です。
- リアルタイム処理:クラウド通信を介さず、即時応答が可能
- 通信コスト削減:ネットワーク帯域を消費せず、効率的に処理
- セキュリティ強化:データをローカルで処理し、プライバシーを保護

シミュレーション技術(仮想環境での学習)
フィジカルAIの学習には大量のデータが必要ですが、現実環境での実験には時間やコストがかかるため、シミュレーション技術が活用されます。
- NVIDIA Cosmos:フィジカルAI開発を加速するための統合プラットフォーム
- NVIDIA Isaac Sim:ロボット向けの高精度シミュレーター
- Gazebo:ROSと連携し、自律ロボット開発に最適
- PyBullet:物理シミュレーションを用いた強化学習
最新の開発状況:NVIDIA Cosmosプラットフォーム
フィジカルAIの開発をリードしているのがNVIDIAです。NVIDIAは、CES 2025で「NVIDIA Cosmos」を正式発表し、フィジカルAI(Physical AI)の開発を加速させる新プラットフォームとして注目を集めています。
「Cosmos World Foundation Models(WFMs)」は、9,000兆トークンと2,000万時間の動画データを学習し、物理的・空間的相互作用を高精度に予測・生成します。これらのモデルは「NVIDIA Open Model License」のもと公開され、商用利用やカスタマイズが容易になり、個人や小規模ベンチャーでも活用可能になっています。
Cosmosの主な特徴
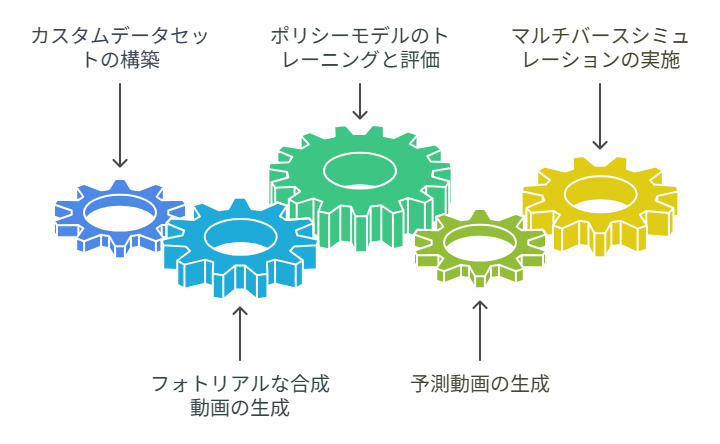
- ビデオ検索:開発者がAIモデルのトレーニング用にカスタマイズされたデータセットを構築できます。
- 制御可能な3D-to-Real合成データ:開発者は自身の3Dシミュレーションデータを活用して、フォトリアルな合成動画を生成できます。
- ポリシーモデルのトレーニングと評価:アクションに基づく動画予測のためにファインチューニングされており、フィジカルAIシステムの戦略を定義するポリシーモデルのトレーニングと評価が可能です。
- フォーサイト(先見の明)機能:過去のデータやテキストプロンプトに基づいた予測動画を生成し、フィジカルAIが最適な行動を選択できるようにします。
- マルチバースシミュレーション:NVIDIA Omniverseを使用することで、開発者は複数のCosmosによる結果をシミュレーションし、リアルタイムのシナリオを評価できます。
フィジカルAIの応用事例
フィジカルAIは、様々な分野で応用され始めています。
敏捷性の高い人型ロボット
カーネギーメロン大学の研究者がNVIDIAと共同で、人型ロボットの敏捷性のためのAIフレームワークを開発しています。
このフレームワークにより、ロボットはより自然で滑らかな動きを実現し、複雑な環境でも安定して動作できるようになります。
自動運転車
テスラのFull Self-Driving(FSD)V13は、フィジカルAIを活用した自動運転技術です。
道路上の障害物を最小限の動きで避け、ほとんどのシチュエーションにおいて人間のドライバー以上に安全な運転をしてくれます。
自動運転バス
日本でも国内初の中型バスによるレベル4自動運転での営業運行が2025年2月に開始されました。
このシステムでは、フィジカルAIを活用して車両の周囲環境を高精度に認識し、安全な走行を実現しています。
産業用ロボット
工場や倉庫で活躍する産業用ロボットにもフィジカルAIが導入されています。
例えば、安川電機は米NVIDIAのGPUを標準搭載したAIを活用した産業用ロボット「MOTOMAN NEXT」を開発し、AIとロボットの融合を進めています。
掃除ロボット
自動運転電気自動車の車内を掃除するロボットなど、日常生活に密着した分野でもフィジカルAIの応用が進んでいます。
これらのロボットは環境を認識し、最適な清掃経路を自律的に計画できます。
医療分野
NVIDIAは2025年3月、フィジカルAIを活用した自律型画像診断の開発推進を目指し、GE HealthCareとの協業を発表しました。
自律型X線システムの開発により、医療診断の効率化と精度向上が期待されています。
フィジカルAIがもたらす未来
フィジカルAIの発展により、私たちの生活や社会はどのように変わるのでしょうか?
産業革命
製造業や物流業では、より高度な自動化と効率化が進み、人手不足や労働環境の改善に貢献します。人間とロボットの協働がより自然になり、生産性の大幅な向上が見込まれます。
自動運転の普及
レベル4、レベル5の完全自動運転が実現し、交通事故の減少や移動の効率化、移動弱者の支援につながります。
都市設計や交通インフラも大きく変わる可能性があります。
医療・介護の進化
手術支援ロボットや介護ロボットが高度化して、医療の質の向上と医療従事者の負担軽減に貢献します。
身体機能を拡張するエクソスケルトンなども普及するでしょう。
災害対応・危険作業
災害現場や危険な環境での作業をロボットが代替することで、人命リスクを軽減し、より効果的な対応が可能になります。
教育・研究
フィジカルAIを活用した教育ツールや研究支援システムにより、より直感的で効果的な学習・研究環境が実現します。
課題と展望
フィジカルAIには大きな可能性がある一方で、いくつかの課題もあります。
技術的課題
- データ収集の困難さ:現実世界の多様な状況をカバーするデータ収集には膨大なコストと時間がかかります
- エネルギー効率:高度な計算処理に必要な電力消費の問題をどう解決するかが課題です
- リアルタイム性の確保:物理世界との相互作用には、遅延のない応答が求められます
社会的・倫理的課題
- セキュリティとプライバシー:物理世界で活動するAIが収集するデータの保護が重要です
- 責任の所在:自律的に判断・行動するAIによる事故や問題が生じた場合の責任の所在が不明確です
- 雇用への影響:自動化の進展による雇用構造の変化にどう対応するかが課題です。
今後の展望
フィジカルAIは、急速に発展している分野です。
NVIDIAをはじめとする企業や研究機関の取り組みで、技術的課題は徐々に解決されつつあります。オープンなプラットフォームやライセンスの提供により、より多くの開発者がフィジカルAIの開発に参加できるようになっています。
今後は、各産業分野での実証実験や実用化が進み、徐々に私たちの日常生活にもフィジカルAIが浸透していくでしょう。生成AIとフィジカルAIの融合により、より高度で人間に近い判断能力を持つAIシステムの実現も期待されています。
まとめ
フィジカルAIは、AIが仮想世界から現実世界へと大きく踏み出す革新的な技術です。
物理法則の理解と適応、自律性の向上、安全性の確保、精度の向上といった特徴を持ち、センシング技術、機械学習・強化学習、ロボティクス、エッジAI、シミュレーション技術といった多様な技術要素によって支えられています。
NVIDIAのCosmosプラットフォームをはじめとする最新の開発により、フィジカルAIの実用化が加速しており、自動運転車、産業用ロボット、医療診断など様々な分野での応用が進んでいます。
技術的・社会的課題は残るものの、フィジカルAIの発展は私たちの生活や社会に大きな変革をもたらす可能性を秘めています。
AIがより身近で役立つ存在となり、人間とAIの新たな共存関係が構築される未来が近づいています。
フィジカルAIの進化を見守りながら、この革新的な技術がもたらす可能性を最大限に活かし、より良い社会の実現に貢献していくことが重要です。
生成AI関連ツール紹介ページ

関連記事






閲覧ありがとうございました。
*****************
中年独身男のお役立ち情報局
Friends-Accept by 尾河吉満
*****************